CH47B + MMS X3D (HTML5) Simulation
Managed to export my VRML simulation to X3D, and embed it here with the HTML5 X3DOM Framework. Note that you will need to use a supported browser in order to view the model.
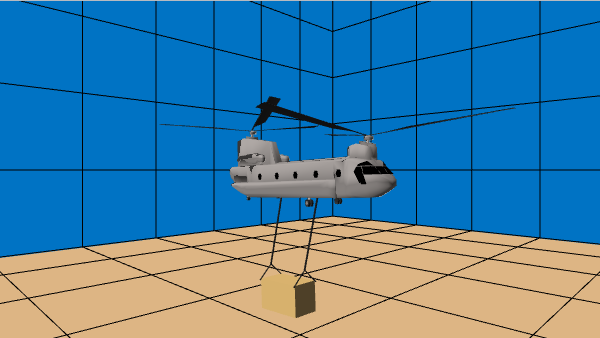
Managed to export my VRML simulation to X3D, and embed it here with the HTML5 X3DOM Framework. Note that you will need to use a supported browser in order to view the model.